
이메일 형식 오류
emailCannotEmpty
emailDoesExist
pwdLetterLimtTip
inconsistentPwd
resetAccountPassword
forTheAccount
pwdLetterLimtTip
inconsistentPwd
resetSuccess
resetSuccessTips
login


서보의 특정 문자
2024-04-29 16:44:08
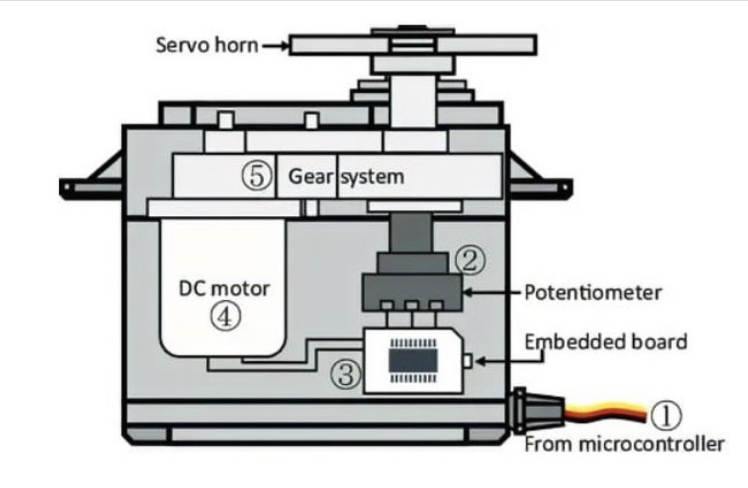
서보의 특정 구조는 다음과 같습니다.
① : 신호 라인 : 마이크로 컨트롤러로부터 제어 신호를받습니다.
② : 전위차계 : 출력 샤프트의 위치를 측정 할 수 있습니다.
전체 서보 메커니즘의 피드백 파트;
③ : 내부 컨트롤러 : 외부 컨트롤에서 신호를 처리하고 모터 구동 및
피드백 위치 신호를 처리하는 것은 전체 서보 메커니즘의 핵심입니다.
④ : 모터 : 액추에이터로서 속도, 토크, 위치가 출력되는 양;
⑤ : 변속기 메커니즘/서보 시스템 :이 메커니즘은 출력 스트로크를 조정합니다.
특정 전송 비율에 따라 최종 출력 각도로의 모터;
서보의 출력은 서보의 신호 라인으로 PWM 신호를 보내면 제어됩니다.
① : 신호 라인 : 마이크로 컨트롤러로부터 제어 신호를받습니다.
② : 전위차계 : 출력 샤프트의 위치를 측정 할 수 있습니다.
전체 서보 메커니즘의 피드백 파트;
③ : 내부 컨트롤러 : 외부 컨트롤에서 신호를 처리하고 모터 구동 및
피드백 위치 신호를 처리하는 것은 전체 서보 메커니즘의 핵심입니다.
④ : 모터 : 액추에이터로서 속도, 토크, 위치가 출력되는 양;
⑤ : 변속기 메커니즘/서보 시스템 :이 메커니즘은 출력 스트로크를 조정합니다.
특정 전송 비율에 따라 최종 출력 각도로의 모터;
서보의 출력은 서보의 신호 라인으로 PWM 신호를 보내면 제어됩니다.
문의하기
제품 태그
문의하기
아래 양식으로 문의해 주십시오. 24시간 안에 회신해 드리겠습니다.